有限公司")
产品中心
Product
AI视觉复合机器人
规格型号:LITEMAZE-ROBOT
光沦科技基于通用底盘及协作机器人开发的智能视觉机器人,实现自动导航、智能识别、自动抓取等功能,应用于科研、教育、农业等的行业,客户也可基于ROS自主二次开发,产品搭配丰富,可选多型号底盘及协作机器人。
咨询产品产品介绍
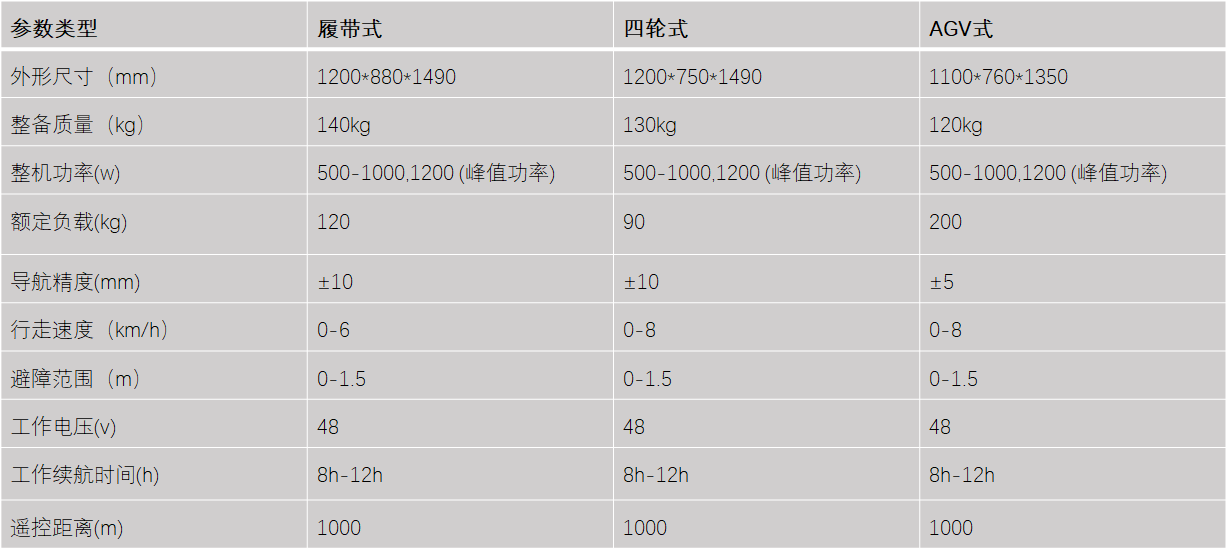
可选底盘配置
 |
 |
 |
|
四轮底盘 模块化四轮底盘,自带智能程控和运行系统,精准转向。 适合在有小幅坡度的平坦地面行走,负重100KG |
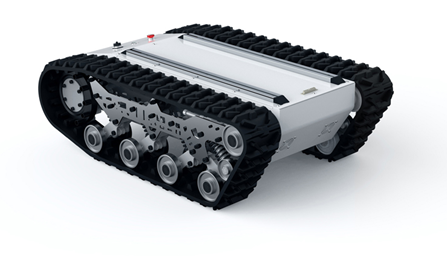
履带越野 独立悬挂,卓越的通过性和越野能力,多种运行场景。 具备优秀的越障能力,适合在复杂环境中使用 |
AGV底盘 高精度轨道精准定位,快速到达指定位置。 适合在室内平整地面环境内使用,速度快,精度高。 |
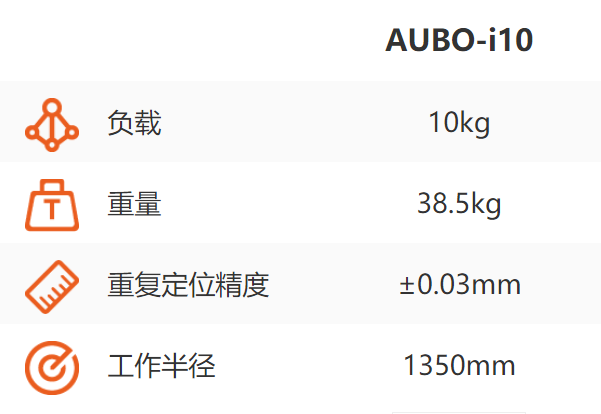
可选协作机器人配置
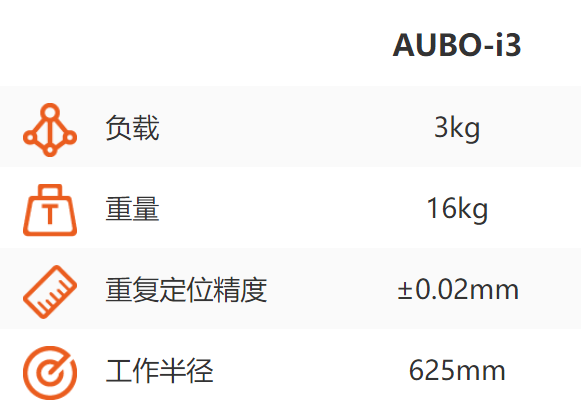
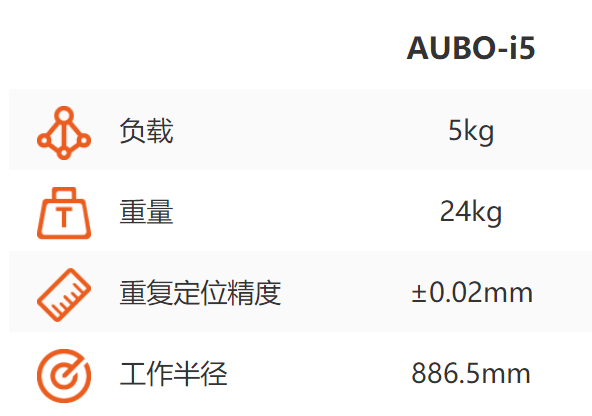
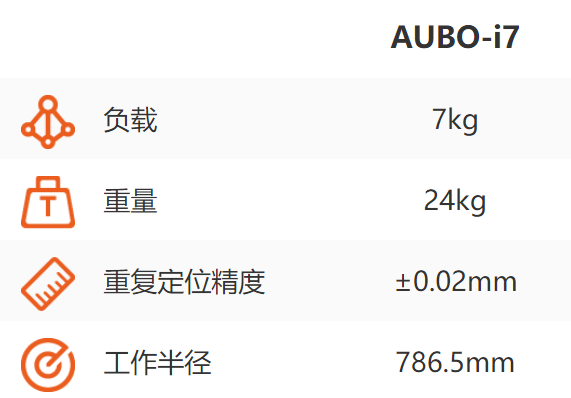
具有3-20KG不同负载能力,可覆盖各行业差异性应用,丰富的配置选择能够实现快速适配各种行业应用场景的需求,是提升生产效率、低成本运作的理想选择。
 |
 |
 |
 |
 |
 |
 |
 |

产品特点
1、自主建图、导航
通过自主研发的导航技术,实现大范围场景下精准导航与定位。 2、力控手眼协调
力反馈控制配合视觉识别,实现物体的精准抓取。
3、机械臂规划
从正逆运动学,运动学到动力学,从关节坐标系到笛卡尔坐标系,搭配丰富的开源案例。
行业应用
在大田/温室/果园等应用场景下,利用多种传感器对农作物和周围环境进行感知和分析,实现高速实时传输数据,无缝驱使机械臂,可广泛应用于解决多种蔬果采摘需求。
 |
 |
|
01可更换末端执行机构 通过替换夹爪/吸盘等多类执行机构 a适应不同形态蔬果采摘需求 b适应不同园艺作业需求,如采摘、套袋、授粉等 |
02多种行走和驱动形式 a支持履带式、轮式等多类驱动底盘 b可适应果园、大棚、田地等多类地形 |
规格参数
Copyright © 光沦科技 | 粤ICP备19136464号