有限公司")
机器人定位引导
3D视觉引导上下料
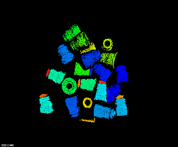
光沦科技研发的3D视觉系统采用结构光加相机的设计方案,具备精度高,物料识别快等特点。通过3D视觉系统实现对工件来料三维扫描定位。快速建立工件来料数据模型,实现柔性定位,可满足不同物料间快速切换。智能化工件识别选取系统,系统优先识别最可靠的引导抓取点,有效解决混料件物料干扰叠压问题。
应用行业
 |
 |
 |
 |
 |
|
汽车制造业 零件装配等工段 |
工业铸造 铸造工件上下料 |
家电行业 组装装配上下料 |
3C电子 组装及装配工艺 |
农业科技 自动采摘 |
应用优势
|
|
性价比高 自主研发结构光相机,最高精度可达0.08mm,成像速度高,0.8S成像。 |
|
|
快速部署 自主研发物料简易建模软件,实现相机拍摄成像后,生成物料3D模型,设定抓取点。 |
|
|
简单易用 可设定优先抓取点,智能规划抓取路径,有效避免撞框、撞料或者撞机的情况发生。 |
|
|
通用性强 可识别多种材质物料,金属件、塑胶件、木质件等,包括反光金属件、铸造件、线圈、塑胶管等物料都能有效识别定位抓取。 |



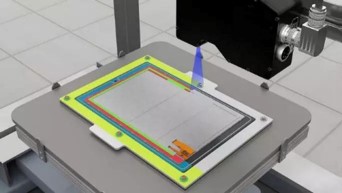
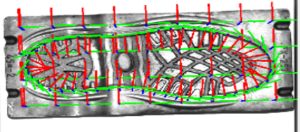
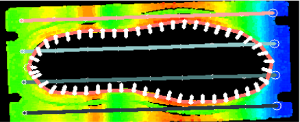
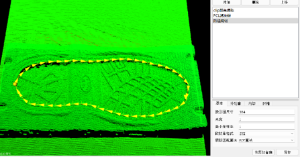
3D视觉轨迹规划(打磨/喷涂)
可实现通过视觉识别工件后,根据工件的结构特征实时生成机器人作业运动轨迹,并引导机械臂进行喷涂、涂胶或打磨等连续性工艺作业。
解决方案:
通过AI+3D视觉与机械臂系统结合,3D视觉识别到作业工件后,实施生成点胶轨迹,控制机器人在工件上完成点胶涂胶。
行业应用:
|
|
|
|
|
鞋底涂胶 钣金喷涂 门板涂胶 门板切割 焊接引导
|
||


|
适配性强 软件适配多种结构光、线激光3D传感器,可根据点云成像实时生成机械臂运行轨迹。
高度智能 工件随意上线摆放,可自动纠偏机械臂运行轨迹。
通用性强 可识别多种材质物料,金属件、塑胶件、木质件等都能有效识别。
|
|
|
|
|
|
|
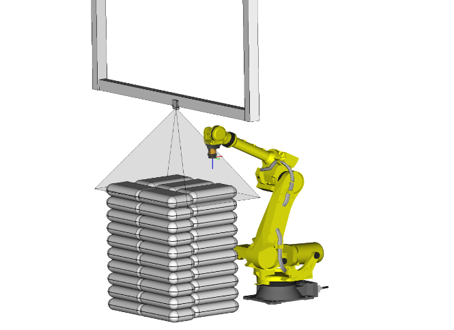
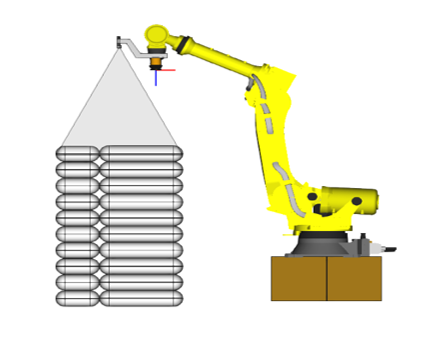
3D视觉拆码垛
通过3D视觉与机械臂系统结合,3D视觉识别到包装产品,将坐标元素发送机械臂引导抓取,定位准确度达99%。适用于仓储物流行业中各种纸箱、麻袋、料筐等物体的拆码垛解决方案。通用性强、易用、部署时间短、上手快。
|
|
|
|
|
|
仓储 |
立库 |
搬运 |
食品 |




|
相机精度 |
5-10mm(1.2-3m参考距离) |
|
节拍 |
0.5S/单次成像及识别坐标 |
|
垛型 |
1.2*1.2;1.2*1.5;1.5*1.5(单位:m) |
|
成像材质 |
纸箱;塑料箱;麻袋;PE袋;蛇皮袋等 |
|
通讯方式 |
TCP/IP |
|
工作距离 |
1.5-3(单位:m) |
安装方式:
|
|
|
|
眼在手上 即相机挂载在机械臂末端轴随机械臂移动至被测物体上方拍照;优点:灵活、安装方便。 |
眼在手外 即相机固定挂载在被测物体上方,拍照后引导机械臂作业;节拍快,与机械臂作业并行工作 |
适配机器人:
| 机器人类型 | 品牌 |
| 协作机器人 | 遨博、节卡、优遨、新松、艾利特、越疆、珞石、大族 |
| 工业机器人 | A B B、KUKA、安 川、发那科、埃斯顿、广 数、图 灵、新 松、埃夫特、卡诺普、拓斯达 |
